Golan Levin: And welcome back to our second presentation of our afternoon session here at Art && Code: Homemade. I’m Golan Levin, professor of electronic art at Carnegie Mellon, director of the Art && Code festival and the STUDIO for Creative Inquiry. And I am thrilled to introduce our next speaker, Jorvon Moss, also known as Odd_Jayy, who is a California-based tinkerer, designer, rising Instagram star, and autodidact who creates wearable robotic companions and invents new forms of interactive electronic couture. Jorvon Moss, Odd_Jayy.
Jorvon Moss: Hi, everyone. Okay, so a little bit about myself. My name is Jorvon but I go by Odd_Jayy online. And I’m a self-taught maker from LA. Self-taught from college; I’ve been doing this for like five or six years now. I’ll have a small presentation here.

This little version of me, this is a fan art from a friend, who pretty much drew me with some of my other, earlier ideas and inventions and little toys and tools that I put together.

I’ve done a few events as well. I was able to meet Alex Glow and we did talk at Maker Faire San Francisco in back in 2018. I love doing those type of things. I love giving talks. I like trying to inspire people with what we do and hopefully inspire people to build their own little robots. So, I’m constantly like, happily passionately…to talk about these type of things.
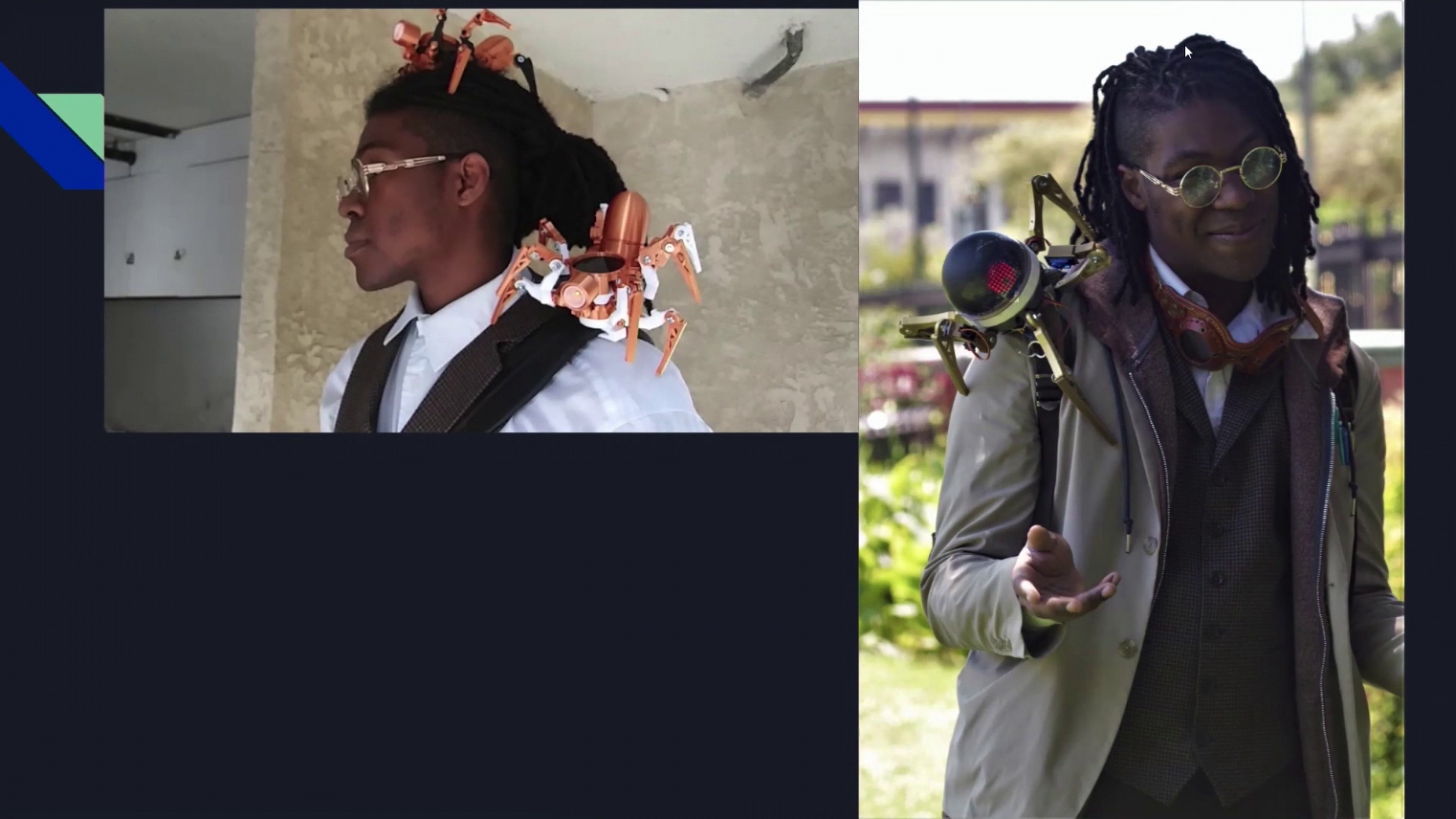
So I’ve been doing this for a little while. I’ve been mostly kind of self-contained. I am very story-driven, so I always try to build a robot based off of some type of genre, whether it be steampunk, or cyberpunk, or…whatever you might think. So yeah, I do a whole bunch of random shoots here and there, and back before COVID, I was able to take my robots out with me sometimes and I would just go out somewhere or go meet up with a friend and I’ll just…have a random robot on my shoulder.

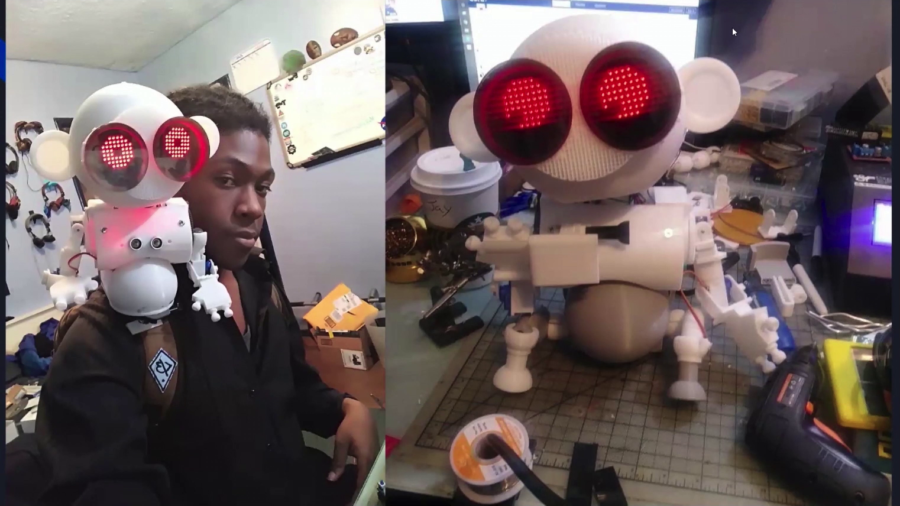
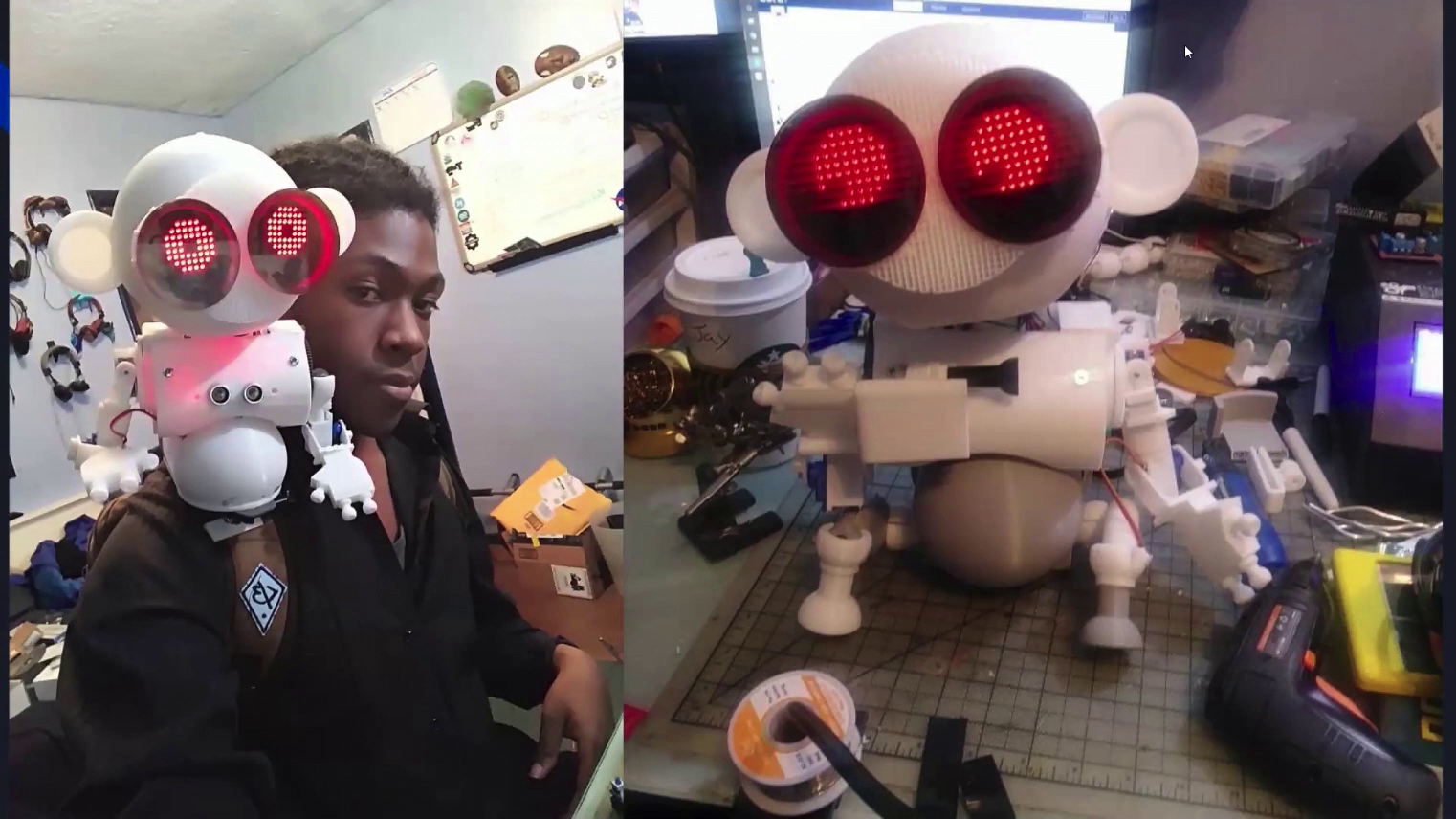
Of course, like I said before, it’s more events. In these pictures, you can see the same robots. It’s actually one of my favorite robots, Dexter, who’s a robot monkey. I designed Dexter a while ago, and he’s gone through so many iterations at this point. But this is literally days apart. The one of the left is during a Supercon—2018 of course—hangout. 2018/2019. And then I got really inspired from hanging out with all the other makers that I actually went home and redesigned Dexter’s face to look like this in the picture on the right.

This is me at DesignCon. So, I’m very big on design because of course we have to think of design we you’re making a robot because you can’t— I’m not really a fan of making a robot just on a function. Because you can make anything really function and make it look not that cool. It’ll work, but it won’t look cool. I mean, what’s the fun with that? So I do my best to activate a lot of design into my work. So I’m going to show you a little more of my work behind me in a second. But I do a lot of stuff like that.

This is actually from an online Maker Faire last year with me, Alex, and our friend Angela, who did a talk on wearable robots. Very fun. If you guys haven’t had a chance to take a look at it, it’s definitely on YouTube. And we talked about all the [indistinct] processes, the different materials, ideas… It was a very very fun time, going into all the details of everything we do.

So this is one of my other ones that I actually designed to wear on my head. It’s very small, but I’ve been trying to branch out a bit and not just wear robot on of course my shoulder. I want to wear them any other place I can think of, like my hair for example. So I designed a robot to fit it my hair.

This is one of my favorite robots. It’s name is Widget. It’s actually a wearable dragon. I still have him, but I ran into some design errors and I just haven’t gotten back to building a dragon because it took a lot of time just to get him to that point, and trust me it was not easy.
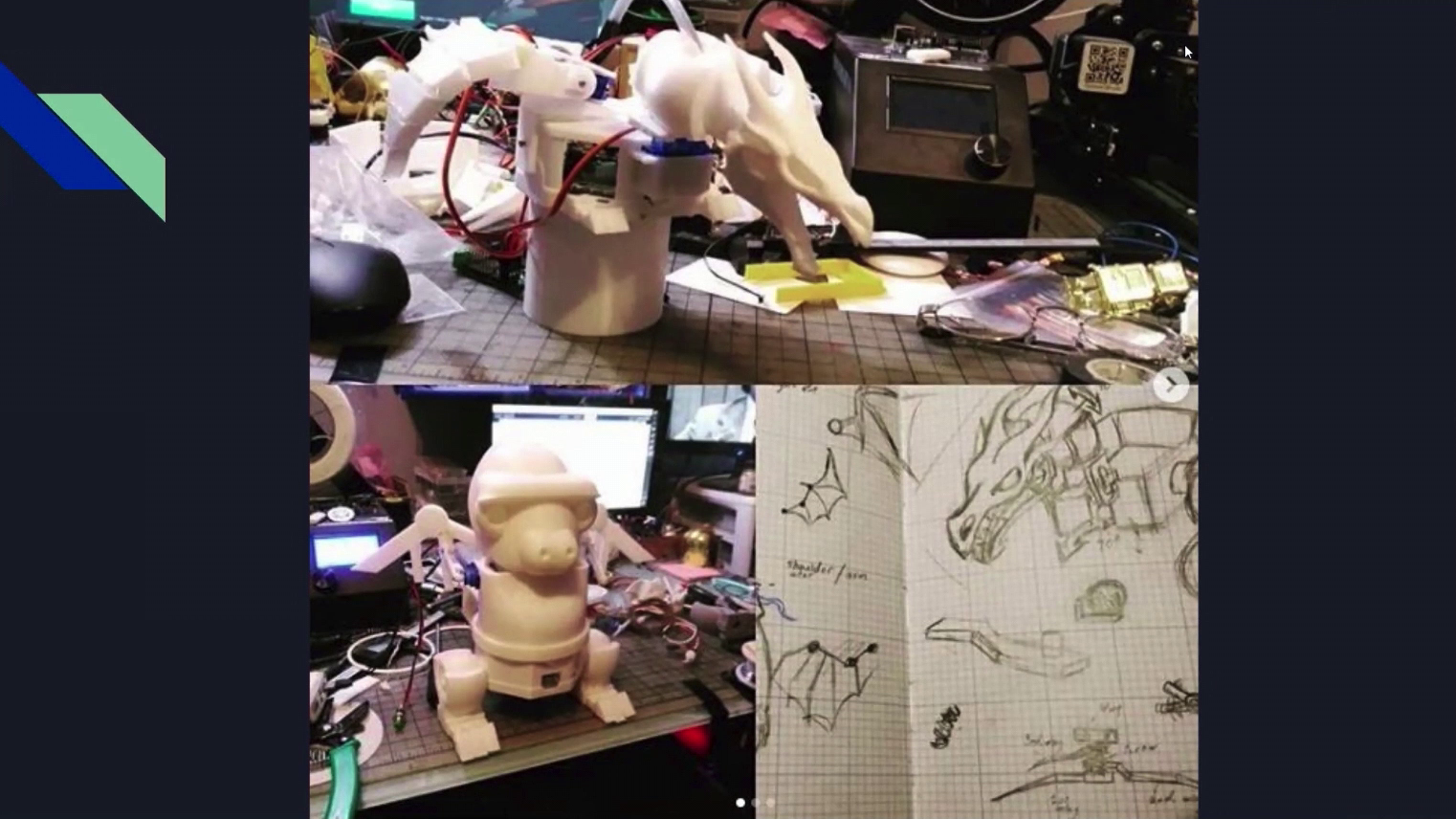
This is kind of my design process. I do a lot of sketching. I have an arts degree. I went to art school for years and got a degree in illustration. So, I do a lot of sketching before I [indistinct] the design process. So I’ll sketch out an idea, see if I like it. Then I go into Fusion 360, CAD it up, put all the design work into it. Print it out, test it, see if I like it, see if it works. And then I constantly do this type of redesign. I keep things that I like, I get rid of things I don’t like. I’ll reprint parts if something is wrong with them or there’s something I don’t like about them. And I continue to go with that process.
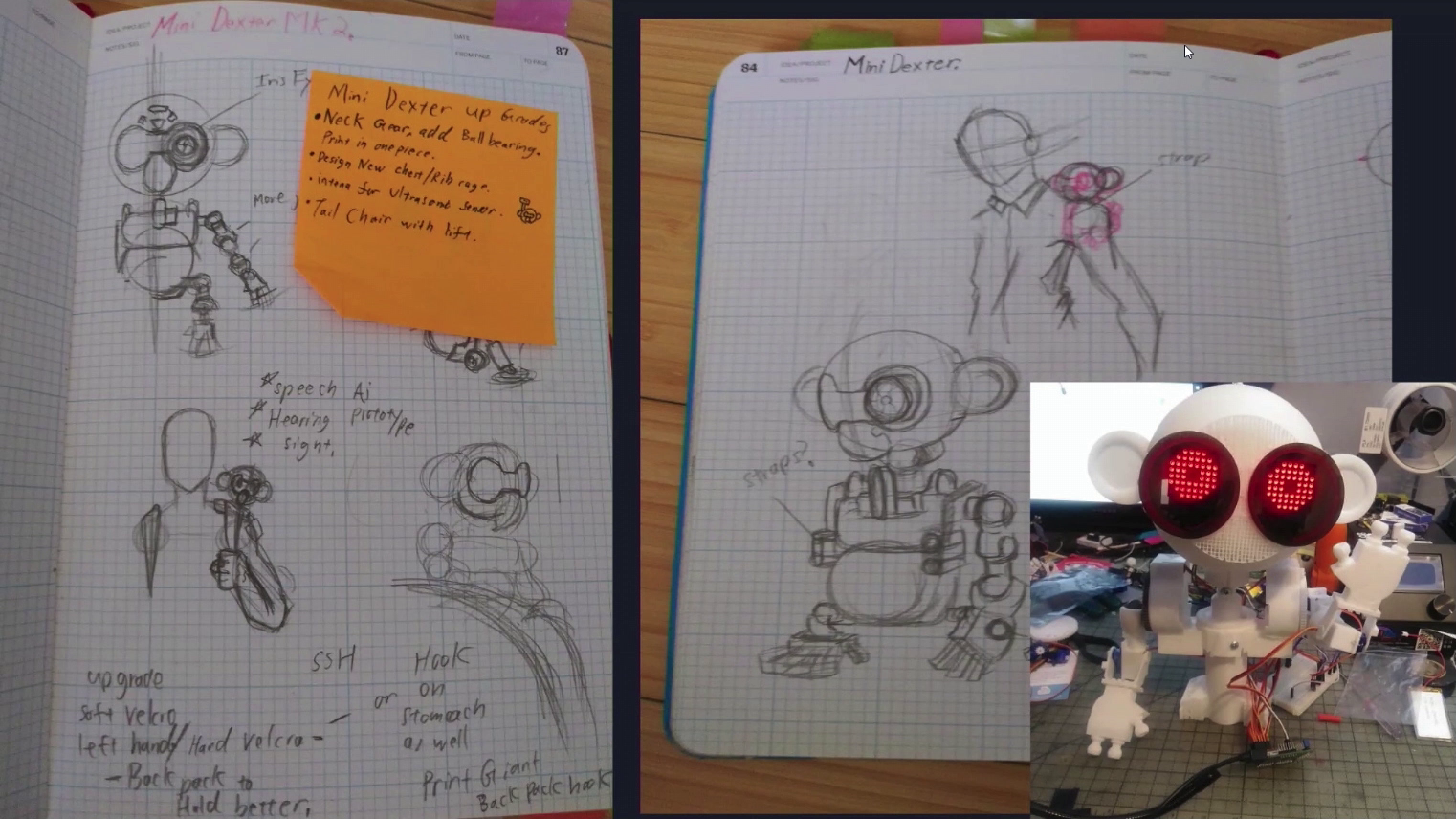
This is definitely one from of course my robot monkey Dexter. Some of my sketchbooks and then of course of course a quick print I did when I was trying to get the mechanism together. A lot of the stuff I do is always very quick sketches. It’s not very detailed, not like fully illustrated. It’s literally just trying to get the idea on the paper. And it helps, too. Like you see there, I have a sticky note on the sketches because I just need to kind of figure out things. And of course I use different colors sometimes. That way I can draw around things and kind of see how this could look, or how it’s supposed to look, or how it maybe will look.
And then of course the testing. This was my Dexter Mk 1. This was his first design. Originally I was trying to wear him on my shoulder. As you can see, he is huge. He’s way too big to wear on my shoulder.

And I had the fun time of learning the hard way that it wouldn’t work. So the picture on the left is my first outing with him. And he literally broke in half. It was a very very like, “Noooooo!” moment. But I take it in stride. A lot of times the first draft and the first design never really works out. So of course, being the person I am, I literally saw what was wrong, took notes, went back home, and I got back to redesigning it so it doesn’t happen again.

So that taught me to build Dexter as more of a giant puzzle piece. So now I can easily disassemble and reassemble him at any time, in any way I really want to. Because if you’re going to be carrying around a robot, you definitely have to think about what happens if it breaks, or something messes up while you’re out. You have to kind of improvise or think of an easier way you can put things back together, that way you can continue enjoying your event or whatever with your robot.

These are my last ones for my presentation part. I did a lot of work on this new Dexter. This is him now on the left screen here, holding the sticker. Just super…more detailed; a lot bigger than he used to be. A lot more movement, a lot more fluently, and I also got into the habit of designing mini versions of him. So on the right that’s actually one that I took with me to work one day, and mini Dexter who had a camera in his eye. So while it’s looking around he was taking pictures and I was able to look back and look at those pictures later. That’s one of them.
Also, because I promised to finish this before the day, I want you to introduce you all to my current newest robot friend I call RX-27. Yeah, I know. He’s very small and cute—but he beeps. I’ve been working on this one for about a month now, I think. I started him back in December, because I found out that I was going to get to some very obvious issues with making wearable robots. Mostly because they’re so big now, because I put so much work and effort into them that they have a tendency to break, and a tendency to be too big when carrying them around. So when I designed RX here, he’s extremely small. Like, compared to my head. He’s very very small. And easy to carry around. Those were my two big concepts when I was working on this little guy.
He also comes equipped with new stuff I’m still working on, which are like little clipper hands, little grabbers. And I can easily take him, put him in the cup and then give him attachments.
So yeah, that’s pretty much my main process. My main goal for all of this, especially because I know a lot of people always ask me if I plan to sell them, if I plan to do anything like that. And to be honest with you, I don’t really plan to sell anything right now. I probably will get into the idea of creating a common wearable robot for the future. But mostly I got into this because I just liked building robots. I was not a very social kid growing up. So I got very into the concept and the idea to build my own robots. And when that came to be, I became a little bit more popular and things started happening. And I have a lot of people always asking me if I’m going to sell it, if I’m going to do this, going to do that… But for right now, I really just want to continue expanding upon it.
There’s a good chance in the future, like especially during COVID—this has actually helped me a lot—that I spent a lot of time by myself because of the isolation. And making a robot that I was able to kind of communicate with definitely helped me through it all. I spent a good time just…thinking of if I wanted a best friend, R2-D2 or WALL‑E, how would they look? How would they move, how were they designed. And this got me to an idea of what if I put AI into this robot? What if I install a chatbot to it. What if…not saying I want to get rid of the human experience, of course, but what if you could take your robot…and have a robot at home. That if you live alone and you can’t have a pet or a dog because of apartment rules. But you could have a robot to talk to. That you’ll still have that type of…I want to say, conversational intimacy with a robotic creature.
And of course that could help for the future. I mean, definitely a lot in science fiction they have spaceships and long journey-type of stuff, and most of the time people seem to be by themselves. So imagine having a little robot that you can just have on the ship with you and just talk to that, and it’d help you keep sane as you go through years and years of space travel. So that’s what I kind of hope…things happen when it comes to wearable robots.
That’s pretty much it. Any other questions?
Golan Levin: That is awesome. We have time for questions, and there’s a lot of questions for you, Jorvon. Thank you. [Moss starts laughing] No, no, this is is good. No, this is great. Thank you so much. This was fantastic. Thank you so much Jayy. I’m gonna kinda start hitting you up with some question here.
Jorvon Moss: Sure.
Levin: Alright, first. This is my question. Kate Hartman has pointed out, she says robot wearability sounds like a really exciting research area. And I agree. And it’s not something that I think…it’s not really a phrase I’ve ever heard before. And so my question is like, what’s in your opinion required technically and conceptually for a wearable companion bot? For example in relationship to the body but also in relationship to society. And I’ll give you an example of what I mean. Like one could say like oh, well there’s special things that are required in order for it to actually clip onto my shoulder. It can’t just have regular legs, it has to have like a saddle or something like that, or some kind of way that it relates to my body.
So you know, you’re one of the world’s foremost designers of wearable robots. You are, right. So tell us, if I wanted to design a wearable robot, what kinds of things would I have to think about. Especially in terms like how other people see me, as well.
Moss: Well, definitely always think about size, definitely. And also how flexible it is? It sounds very weird, but if you build something like a robot monkey, my robot monkey has ball joints on it. Because they’re flexible. So sometimes if you’re moving very fast, I don’t have to worry about an arm popping off or something like that happening.
You also have to think on where you want to wear it. Because depending if it’s on your shoulder, you might want to…have strong shoulders for one, trust me. Or you might want to definitely look into something very small or something even lighter. An example of that is when I did my robot spider, and I made a little hairpiece for him, the original one was too heavy. It was way too big and it gave me a headache. So I had to design it and actually make it smaller and lighter, that way it can fit on my hair comfortably.
Levin: How about out in the world in terms of other people seeing these things. Now, there’s some famous stories about people going through airports with electronics and getting in trouble with people who’re very suspicious of what they think could be a bomb or something like this. So how do you create wearable robots… These are not subtle robots. People notice them. They’ve got blinking LEDs, you know. They make noise. Tell us about conditions for wearing them in the world.
Moss: I’ve learned, just for me personally, that cuteness is key. Sounds really weird. But as humans we have…of course, we project a lot. So, I use a lot of LED eyes, especially like for RX-21 here, to simulate like this is cute, this is harmless. Because I’ve noticed when it comes to robots that have actual eyes, the actually LED eyes that people can see, people see them as cute or cool. And I usually get away with them pretty finely. But things like my spider robot who doesn’t have any real eyes, he’s wearable hairpin one, is more creepy to people. People see him and like oh, it’s cool and pretty but since it doesn’t have any eyes or even a real face, just giant LED for a head, people find that way more creepy, and people are a little bit less okay with approaching me about it or talking to me about it.
So definitely [inaudible] the design concept of cute and harmless in your mind, because we’re humans, and Terminator has totally messed up our perception of robots.
Levin: There’s lots more questions. Lea actually observes that she’s found an article entitled A Survey of Users’ Expectations Towards On-body Companion Robots.
But other questions. This is from Vernelle Noel, who’ll be speaking later this evening. And she asks, “How has your relationship with these robots made you more aware of your own body, your self, and other non-robots?”
Moss: It’s definitely made me more aware, because I’ve actually started working out a lot more because I wear wearable robots. Like I usually just would go on runs, but since the robots became heavier I started lifting weights so I could be strong enough to wear them all day. I learned that the hard way during Maker Faire back in 2018 wearing my Asi spider on my shoulder all day. At the end of the day my shoulder was both swollen and sore. So it was just heavy, and it was really killing me but I didn’t want to take it off because people were around me. So I’ve just been learning to strengthen my own body so it’d be able to carry this.
Levin: [indistinct] motivation for wanting to work out.
Moss: It works. It definitely definitely works.
Levin: Barb who makes things asks, “How many hours on average do you put into one of these bots?”
Moss: On work days, I put in about five hours per day. On weekends I put on the entire day. I’m constantly building things and working on things. And especially like my robots. Like I will sit down and sketch them out for about an hour or two, and then CADing takes a little while, then printing takes me a while. But I have a personal rule that every day I have to work on something. Whether it just be starting my printer and getting a part printed, or doing a whole wiring thing. So, definitely…if not five hours or more per day.
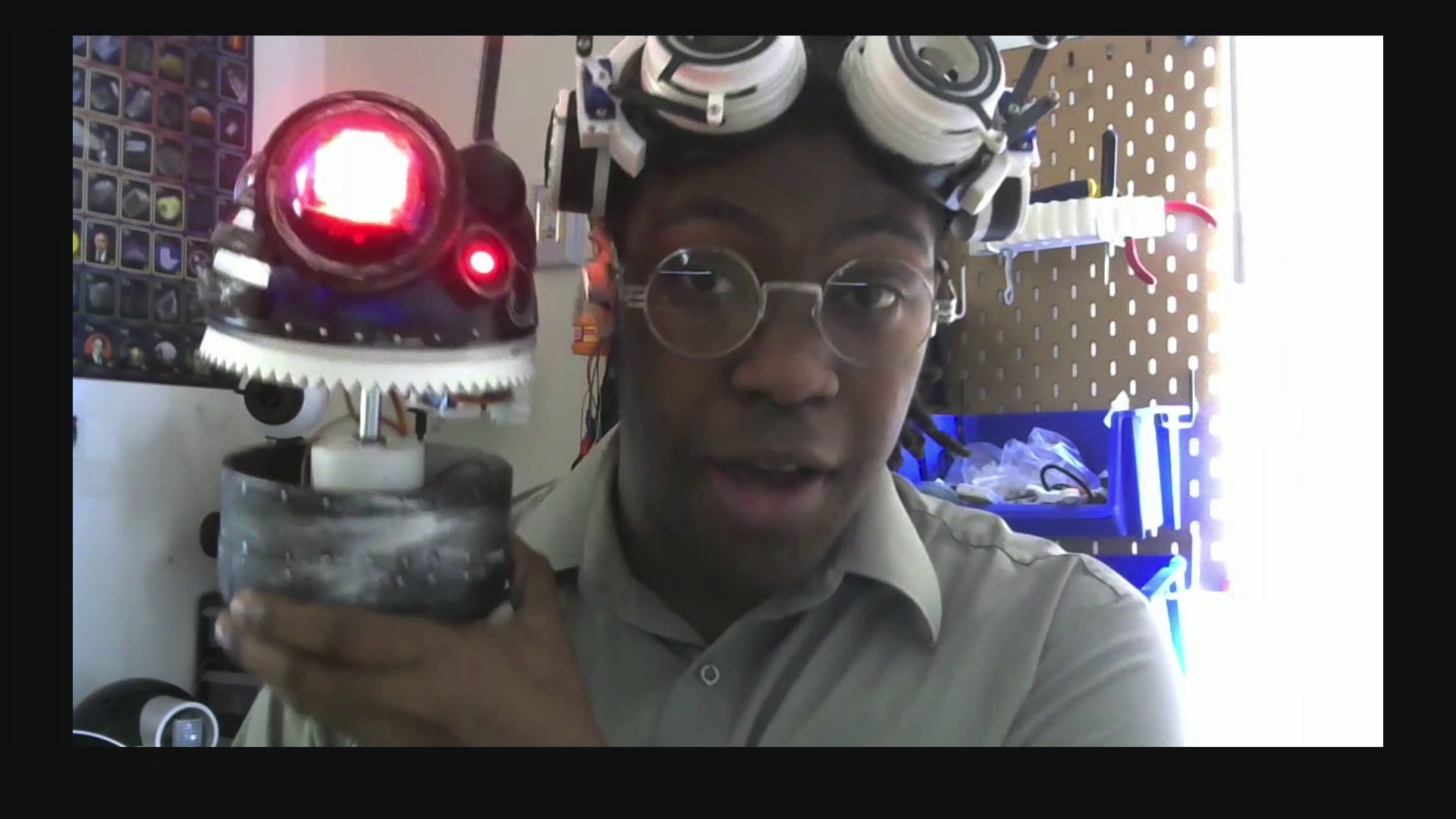
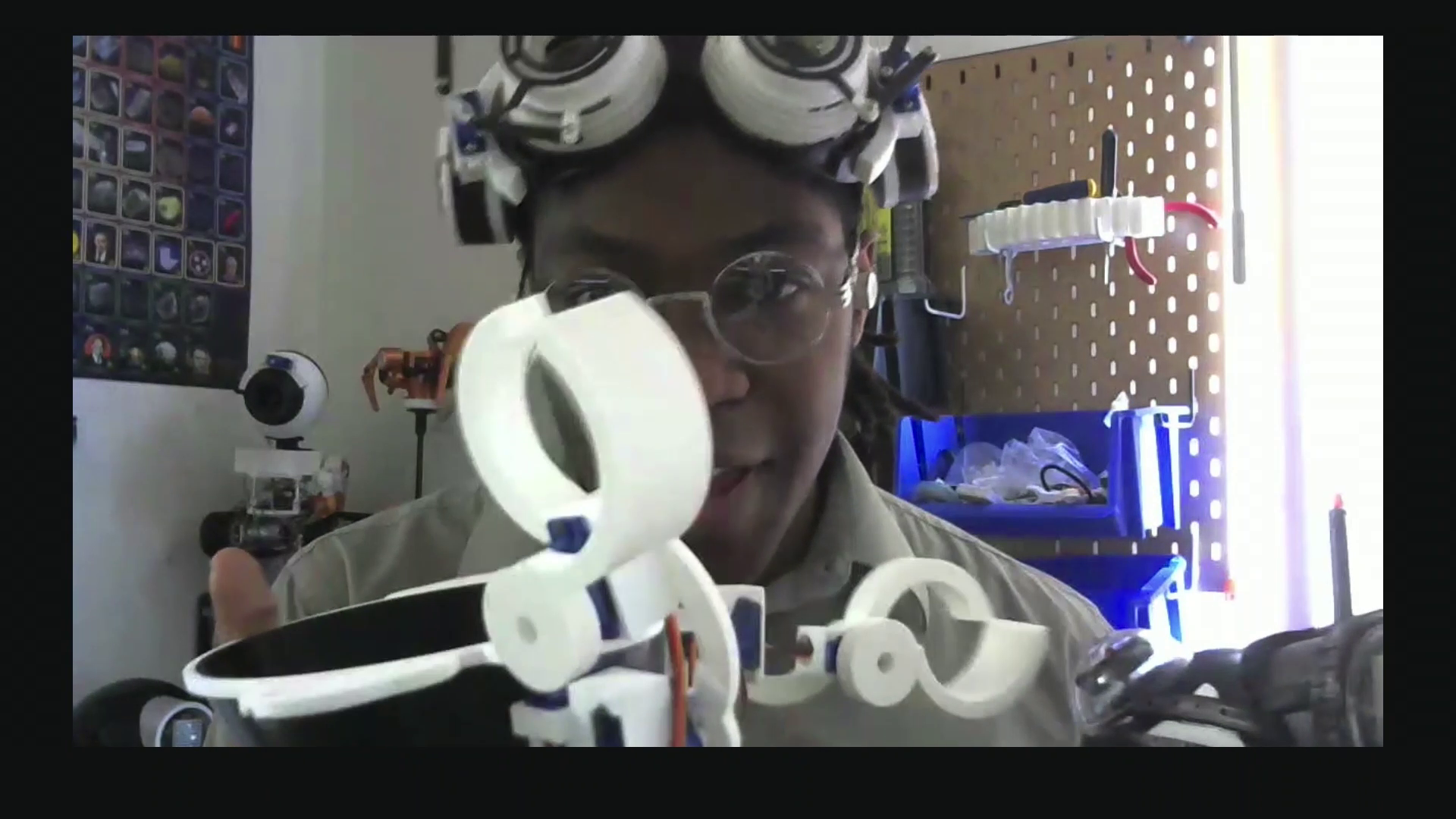
Levin: Wow. The practice shows. Can you tell us about your goggles that you’re wearing? I don’t think you’ve really shown us those.

Moss: Yeah. I meant to but I totally forgot. These are my…I call them magpie eyes. And they’re wearable goggle lenses that are super cool. I designed them after going through…I want to say a bad time. A friend had just passed away and I was having a bad two days, so I had all these extra parts. So I just started taking some goggles I had and I started putting the parts together. So I made these, and I just made a quick video, like, “Hey, I wanted my own cool like gadgeteer goggles. So I built these.” And I posted it on the Internet and it got really really popular, really really fast, and it surprised me. It surprised me really really quickly how popular these are. Because I wasn’t thinking of them as something that was going to be a project or even a famous build. I just built them because I was sad and I had some stuff I wanted to do. And now these work.
Levin: Those are great. Thanks. I’m just looking to see if there’s some more questions here in the chat. People are loving your work.
Do you feel like these… I mean, what’s super interesting to me is that your work spans both sort of like almost Disney-style sidekicks… You know, whether it’s the lead character or the princess who always has the sidekick, or the the bad guy who always has the sidekick, there’s always this sort of sidekick culture in Disney. But there’s also this notion of like electronic couture. There’s a ton of style in what you’re doing. And a question that comes from Claire is do you feel like these pieces are part of a larger fictional or speculative world? Or are they about being with you in this reality?
Moss: I’m gonna say a bit of both. I mean originally when I started this, and even a little bit more popular, I was just building for myself. But during COVID recent times I’ve kind of seen how important it could be in the future. And it’s kind of taken a weird sensation where I’m no longer thinking of it as “hey, this is just me having fun” and now I’m thinking of it as like “hey, this is me having a chance to make something for the future.” So, someone else who is in my situation or if something else happened during a pandemic, you can get a robot.
And I am a Disney fan so I’m really happy at that comparison. Because I am a huge Disney nerd. So, having this little robot with me, like I definitely plan when things calm down to go out with him and do stuff like that, and record people’s responses. Because I think it’ll be an interesting…like you said before, research subject that we can look into, and then hopefully make this like a main thing, a normal everyday thing.
Levin: I realize you don’t get out much from your room, partially because of COVID and partially because of spending five hours a day making these things. But have you had interesting reactions in the outside world from folks who are in the wild?
Moss: Oh yeah. Yeah. Definitely I’ve had about three responses. One response when I was taking the bus to work. I used to always bring my robot with me sometimes just because. I would get some people who didn’t like it. I’ve noticed people who didn’t see the eyes or the robots had lenses for eyes, didn’t like it. They would instantly kind of freak out and be like, “Is he recording me?” and kind of go really paranoid really quickly so I had to put it away.
My second reactions are from people are just like oh that’s cool, or the tech nerds you know, or are just like how’s that work.
Honestly my favorite reaction is from kids. It’s really weird, but kids see my robots and they instantly don’t freak out, they’re not scared. They’re just like oh my god, it’s a robot, and they just run right towards me. I have many stories of taking my robot to the mall and then kids abandoning their parents and being like, “Robot!” And I’m just like, kid go back to your parent.
So those are my three reactions I get when it comes to wearing my robot on the outside.
Levin: I personally have very limited experience. I’ve made maybe two robots, and I swore I was never going to make one again because it’s just such a frustration when they break. And there’s some questions about whether you travel with a repair kit and what’s your field repair routine.
Moss: I have a custom repair kit that has a plug-in solder, some glue sticks that I’ve learned you can take a lighter and heat them up and use them as glue, and things like that. But I also got really good in [indistinct] the design process. I’ll show you a good example really quick with RX here.

I made sure to put all his circuitry pretty much in the head. So I can easily fix any wiring issues by just popping his head open. And then he’ll just do his thing without much of a problem. You start getting really used to designing things to break. So, I constantly might take things out. I kind of expect them to break. And I have a personal rule that’s more of if it breaks it’s technically working because now I know how to fix it.
Levin: There’s some questions also about sort of how you feel about the Internet pressure to immediately commodify the things that you love doing.
Moss: It’s very weird. Honestly I don’t really like it too much. I just got a TikTok like two days ago and I posted like a “Hey, this is me video” and I already have like two thousand, three thousand followers. And a lot of the comments I’ve been reading have been like oh this is great, or some of them are like, “Hey, teach us,” or do this and do that. And at first I was very nervous to, but recently I’m getting a little bit more confident with it. So I’m feeling like there’s a need for this. So I’m feeling a little bit more inspiration to do this because people are desperately asking me on different platforms.
Levin: I think with that we’re gonna wrap it. Thank you so much Jayy. This has been amazing. Maybe the last thing you could do is can you share a view of what’s on your desk right now? I think everyone would love—

Moss: Yeah. My desk currently is filled with a whole bunch of random little things. But in the corner there are my favorite projects that I just keep on the side for I can always constantly look at them. And then of course my desk table is full of just like 3D printed parts right now because I’m still designing RX’s extra attachments. And things like that. My entire like background…there’s the periodic table up there for you know… My weakest subject is chemistry. So I try to focus on that a lot now. But yeah.
Levin: Jayy, thank you so much for sharing your work. It’s really a pleasure to have a view into into your world of fictional robot character sidekick wearable cartoon character couture developments. Thank you so much. It’s been great.
Moss: Thank you.
Levin: Folks, in just a few minutes we’re gonna pick it up with Tatyana Mustakos at what is 2:30 PM Eastern time. So we’ll see you in a few minutes. Thanks a lot.